
Nature-inspired robots from DGIST students — what they built and what they can do
Students and researchers at the Daegu Gyeongbuk Institute of Science & Technology (DGIST) in South Korea have produced a string of small, clever biomimetic robots — from snake-like crawlers to a slow, motor-driven tortoise — as part of hands-on student projects and research lab work. These systems are usually built as research and teaching platforms to explore locomotion, perception, and real-world use cases such as inspection and search-and-rescue. Several international outlets and DGIST lab pages documented the projects.
Below is a detailed, organized look at the robot animals DGIST students have made, how each one works at a high level, and the realistic applications the teams envision.
1) Snake robots (modular / continuum serpents)
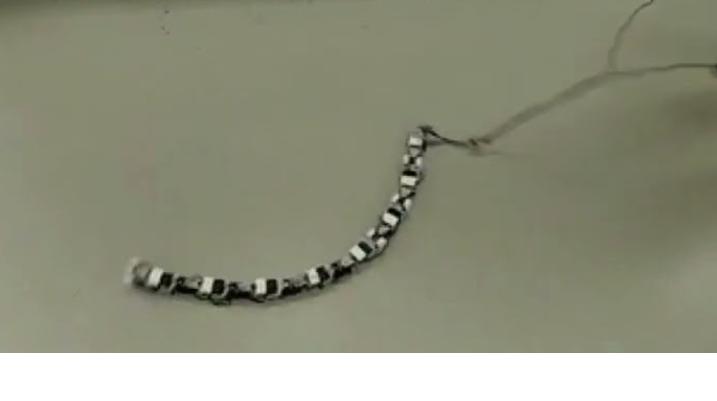
What they built: DGIST teams have multiple snake-robot projects — modular multi-joint “snake” platforms and more complex “Quadnake” designs that use many degrees of freedom to emulate serpent locomotion. One DGIST lab page specifically describes a snake robot and a “Quadnake” quadruped-style robot with 24 DOF that can perform snake-like motions by exploiting joint redundancy.
Key technology: chained modular links with rotary actuators (many joints), embedded joint encoders, body-wave gait generation (phase/amplitude control), and basic onboard sensing for feedback. Some designs use simulation (e.g., PyBullet) to tune gaits before hardware implementation.
Potential uses:
- Search & rescue: slither through rubble, enter collapsed structures, and inspect voids where humans or larger robots can’t go.
- Pipe and conduit inspection: navigate inside narrow pipes or industrial ducts for maintenance and diagnosis.
- Environmental monitoring: probe tight, cluttered natural environments (underbrush, narrow crevices) to collect sensor data.
2) Quadnake / hybrid snake-quadruped platforms
What they built: A DGIST “Quadnake” concept blends quadruped and snake capabilities — it’s described as having many joints (24 DOF in the published lab notes) and can implement snake-style motions with the redundancy of more limbs. These are typically student research prototypes refined from simulation.
Key technology: high DOF joint control, trajectory optimization in simulation, actuator placement tuned for obstacle negotiation, and sometimes compliant elements to handle uneven terrain.
Potential uses:
- Complex terrain traversal: move through narrow, irregular terrain where simple wheeled vehicles fail.
- Research platform: evaluate new locomotion controllers, learning algorithms, and compliant mechanisms for robust locomotion.
3) Robotic tortoise (“Donnie” / turtle-inspired robots)
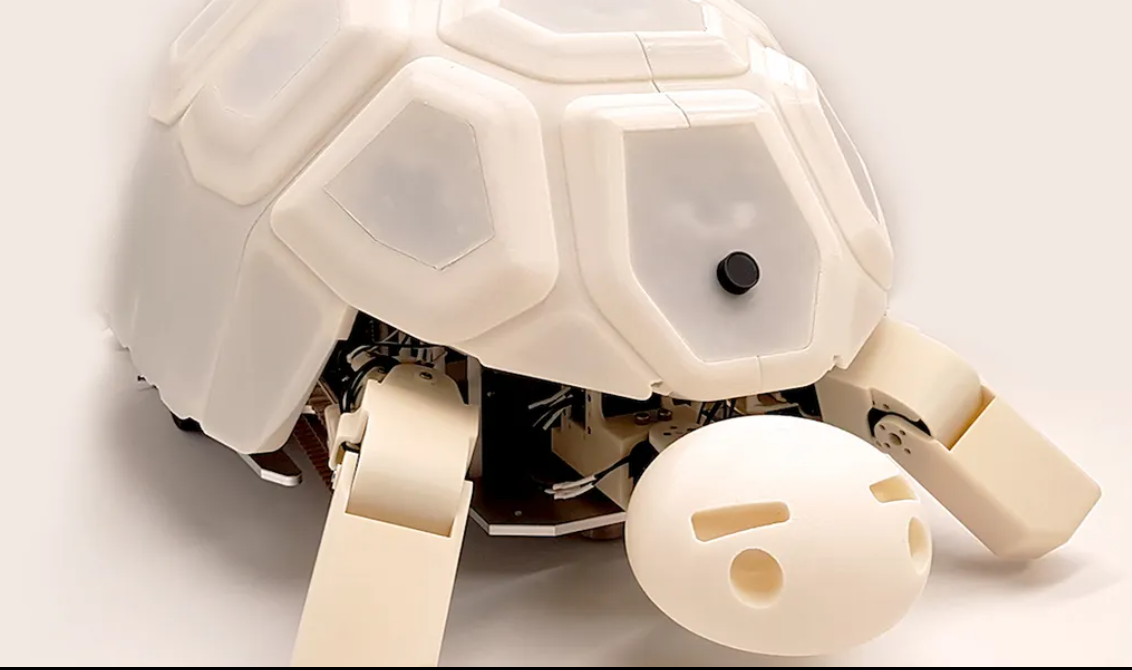
What they built: DGIST students — featured in media coverage — developed a tortoise/turtle-style robot (referred to in some media as “Donnie”) with multiple motors and a protective, 3D-printed shell. Student video/features describe roughly a dozen actuators and onboard compute that let the robot walk slowly and stably. YouTube
Key technology: multi-actuated legs (many small motors), 3D-printed shell for modularity and safety, embedded microcontrollers for gait sequencing, and simple sensing for obstacle avoidance and stable gait control.
Potential uses:
- Education and outreach: an appealing, robust platform for teaching robotics and human–robot interaction, especially with younger audiences.
- Therapeutic / social robotics experiments: slow, predictable motion and friendly shape make tortoise robots useful for demonstration or therapy contexts.
- Low-speed inspection in constrained spaces where a gentle, low-impact crawler is desirable.
4) Aquatic / fish-inspired robots (student projects & prototypes)
What they built: While DGIST’s primary showcased animals in recent media were snakes and tortoises, student groups and labs often prototype swimming robots or soft robotic fish in related research branches (typical of biomimetics programs). DGIST’s student ecosystem and robotics clubs have historically produced small aquatic robots in coursework and projects. (This type of project is common in the same communities showcased by the DGIST features.)
Key technology: tail-propulsion or fin-oscillation actuators, waterproof housings, buoyancy tuning, and simple onboard sensing/communication for pool trials.
Potential uses:
- Environmental sensing (ponds, tanks), education, or low-risk demonstrations of fluid-locomotion control.
5) Insect / small-legged biomimetic robots (student club/teaching builds)
What they built: Student groups at DGIST and related labs build small legged robots (insect-like hexapods or spiders) as club projects or coursework exercises; these are used to study gait coordination and small-scale actuation. The DGIST research roster includes students focused on legged robots and continuum manipulators.
Key technology: small servos or brushed/brushless actuators, simple gait controllers, and 3D-printed frames for rapid iteration.
Potential uses:
- Algorithm development (gait generation, stability), hobbyist demonstration, and teaching control theory.
Design & development approach — what these student projects emphasize
Across these projects, a few recurring engineering patterns appear:
- Simulation-first prototyping: students use physics simulators to test gaits and body designs before hardware builds.
- Modularity & 3D-printing: many student robots use 3D-printed shells and modular links so components can be swapped quickly.
- Low-risk sensors and controllers: prototypes typically combine encoders, IMUs, and simple vision/ToF for localization and obstacle sensing.
- Focus on real tasks: even teaching projects are framed around practical missions (inspection, rescue, education), not just “cute” demos — which helps guide design tradeoffs.
Realistic limitations & safety considerations
- Durability: student prototypes are fragile compared with industrial platforms — repeated rough use (rubble for snake robots, water for aquatic robots) requires careful engineering.
- Perception in the wild: most student demos run in labs or instrumented spaces; deploying into cluttered, GPS-denied field sites needs robust perception stacks and extensive testing.
- Regulatory/ethical considerations: particularly for inspection or surveillance uses, appropriate permissions and safety checks are necessary.
Daegu Gyeongbuk Institute of Science&Technology