From Chatbots to Autonomous Intelligence
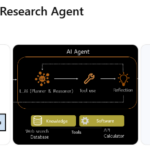
In the rapidly evolving landscape of artificial intelligence, a new class of systems is emerging—systems that do more than generate text. They reason over vast information, interact with tools, and execute complex workflows.
Moonshot AI stands at the forefront of this transformation. Founded in 2023, the company has rapidly positioned itself as a leader in long-context foundation models and agentic AI systems, challenging established global players...
More