
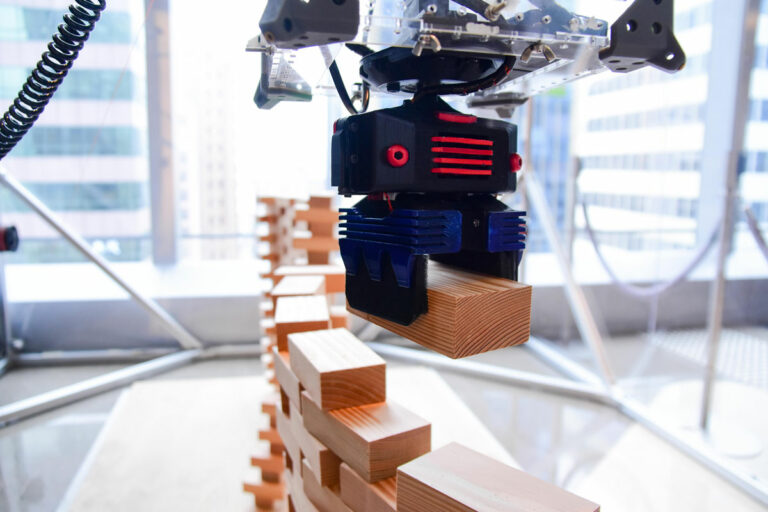
Developed by an interdisciplinary team of researchers at the Chinese University of Hong Kong, CU-Brick is a cable-driven robot capable of building precise and intricate structures, piece by piece.
CU-Brick” system consists of a gripper end-effector and cable actuators which can be mounted on a range of different environments, from metal frame structures to the walls and roofs of buildings. The design is performed through developed intelligent software.

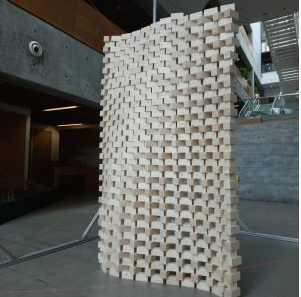
The system will then automatically generate the structure to be built, while keeping the robot within the designated operational region and ensuring the number and location of bricks remain unchanged. It can turn innovative designs into executed complex brick placement operations.

With the ability to work 24/7 and error-free, “CU-Brick” can perform the same task with higher precision and consistency compared to the current techniques which are constrained by several factors including building time and costs. It also better addresses the problems of labour costs and worker safety.
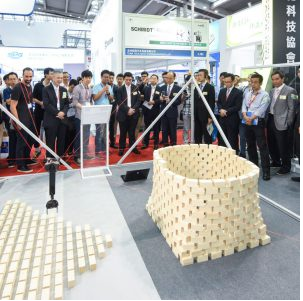
A collaborative research project between the Department of Mechanical and Automation Engineering, T Stone Robotics Institute and School of Architecture, the cable-driven parallel robot explores the possibilities of computational design and CNC automated construction. It seeks to contribute to large architectural design and construction, reducing the issue of scale while maintaining a high level of accuracy and efficiency.
Computational design uses the power of mathematics to generate geometries and neatly interacts with digitally driven robotic tools traditionally used for manufacturing and assembly.
As part of the ongoing research, future versions of CU-Brick will show advancing capabilities in scale, speed and power, bringing it closer to practical use in the building construction industry.