
MIT’s Computer Science and Artificial Intelligence Laboratory pioneers new research in computing that improves the way people work, play, and learn.
Their focus is on developing fundamental new technologies, conducting basic research that furthers the field of computing, and inspiring and educating future generations of scientists and technologists.
CSAIL has its roots in two MIT computing powerhouses: The Laboratory for Computer Science (LCS) and the Artificial Intelligence Laboratory (AI Lab).
Security tool guarantees privacy in surveillance footage
Surveillance cameras can identify individuals, objects… with the use of machine learning tools that can automate video content analysis at a massive scale — but with increasing mass surveillance, there are currently no legally enforceable rules to limit privacy invasions.
MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL), in collaboration with other institutions, came up with a system to better guarantee privacy in video footage from surveillance cameras. Called “Privid,” the system lets analysts submit video data queries, and adds a little bit of noise (extra data) to the end result to ensure that an individual can’t be identified. The system builds on a formal definition of privacy — “differential privacy” — which allows access to aggregate statistics about private data without revealing personally identifiable information.
A flexible way to grab items with feeling
n a recent project, Adelson and Sandra Liu — a mechanical engineering PhD student at CSAIL — have developed a robotic gripper using novel “GelSight Fin Ray” fingers that, like the human hand, is supple enough to manipulate objects.
The gripper consists of two flexible fin ray fingers that conform to the shape of the object they come in contact with. The fingers themselves are assembled from flexible plastic materials made on a 3D printer, which is pretty standard in the field. However, the fingers typically used in soft robotic grippers have supportive cross-struts running through the length of their interiors, whereas Liu and Adelson hollowed out the interior region so they could create room for their camera and other sensory components.
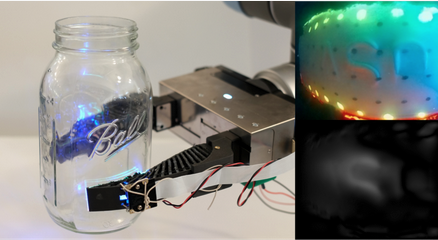
The camera is mounted to a semirigid backing on one end of the hollowed-out cavity, which is, itself, illuminated by LEDs. The camera faces a layer of “sensory” pads composed of silicone gel (known as “GelSight”) that is glued to a thin layer of acrylic material. The acrylic sheet, in turn, is attached to the plastic finger piece at the opposite end of the inner cavity. Upon touching an object, the finger will seamlessly fold around it, melding to the object’s contours. By determining exactly how the silicone and acrylic sheets are deformed during this interaction, the camera — along with accompanying computational algorithms — can assess the general shape of the object, its surface roughness, its orientation in space, and the force being applied by (and imparted to) each finger.
Liu and Adelson tested out their gripper in an experiment during which just one of the two fingers was “sensorized.” Their device successfully handled such items as a mini-screwdriver, a plastic strawberry, an acrylic paint tube, a Ball Mason jar, and a wine glass. While the gripper was holding the fake strawberry, for instance, the internal sensor was able to detect the “seeds” on its surface. The fingers grabbed the paint tube without squeezing so hard as to breach the container and spill its contents.
What sets this work apart from other efforts in the field is that Liu and Adelson have endowed their gripper with touch sensors that can meet or exceed the sensitivity of human skin.
Robotic cubes shapeshift in outer space
Scientists from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) called on electromagnetism – electromagnetic fields generated by the movement of electric current– to avoid the usual stuffing of bulky and expensive actuators into individual blocks. Instead, they embedded small, easily manufactured, inexpensive electromagnets into the edges of the cubes that repel and attract, allowing the robots to spin and move around each other and rapidly change shape.
ElectroVoxels show how to engineer a fully reconfigurable system, and exposes our scientific community to the challenges that need to be tackled to have a fully functional modular robotic system in orbit,” says Dario Izzo, head of the Advanced Concepts Team at the European Space Agency. “This research demonstrates how electromagnetically actuated pivoting cubes are simple to build, operate, and maintain, enabling a flexible, modular and reconfigurable system that can serve as an inspiration to design intelligent components of future exploration missions.”