Bionic Learning Network is a research initiative established by the German control and automation company Festo, in collaboration with universities, institutes, and other companies.

The definition of the term bionics precisely summarizes the objective of the network: application of biological methods and systems found in nature to the study and design of engineering systems and modern technology.
The Bionic Learning Network has developed many other fascinating innovative engineering devices by adopting insights from biological systems and phenomena.
BionicSwifts are agile, nimble and can even fly loops and tight turns. The five artificial swallows can move in a coordinated and autonomous manner in a defined airspace by interacting with a radio-based indoor GPS (ultra wideband, UWB).
Festo BionicSwift 2021
Festo – BionicSoftHand
The pneumatic robot hand is modelled on the human hand and can learn through artificial intelligence to grasp different objects and turn them into a desired position.
BionicFlyingFox
Ultra-lightweight flying object with intelligent kinematics
SmartBird
Bird flight deciphered
For the SmartBird, Festo was inspired by the herring gull. The ultralight flying model impresses with its outstanding aerodynamics and maximum agility and is able to take off, fly and land without an additional drive.
Other Projects:
AirJelly – is an air floating device modeled on the principle of a jellyfish floating in water.

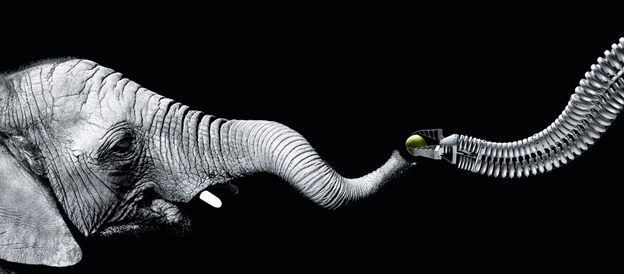
Bionic Handling Assistant – is a flexible robotic gripper arm inspired by an elephant’s trunk.
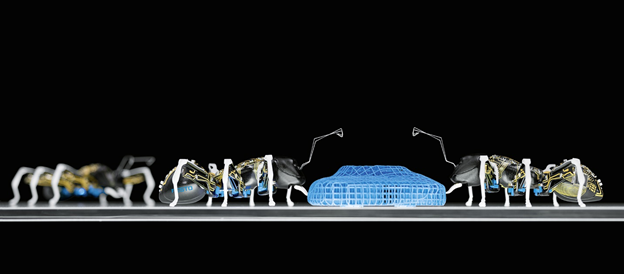
BionicANTs – are mechatronic miniature ants, which similar to their natural counterparts have abilities for cooperative behavior in accomplishing a common task.
eMotionButterflies – are bionic butterflies built from lightweight materials with a capacity for coordinated flying behavior.

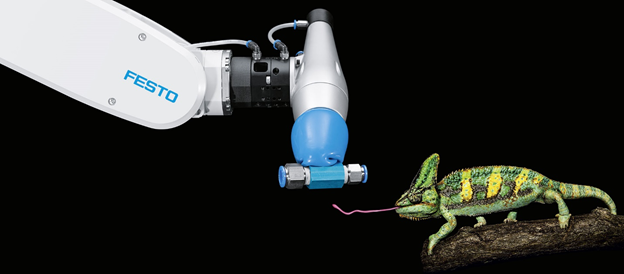
FlexShapeGripper – is a gripper that employs an elastic silicon cap for grasping objects with different shapes, inspired by a chameleon’s tongue.
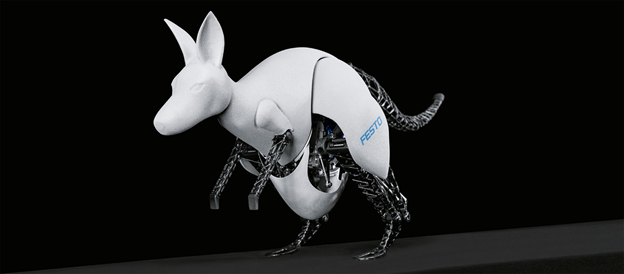
Bionic Kangaroo – is a mechatronic kangaroo that employs pneumatic actuators for hopping around.