
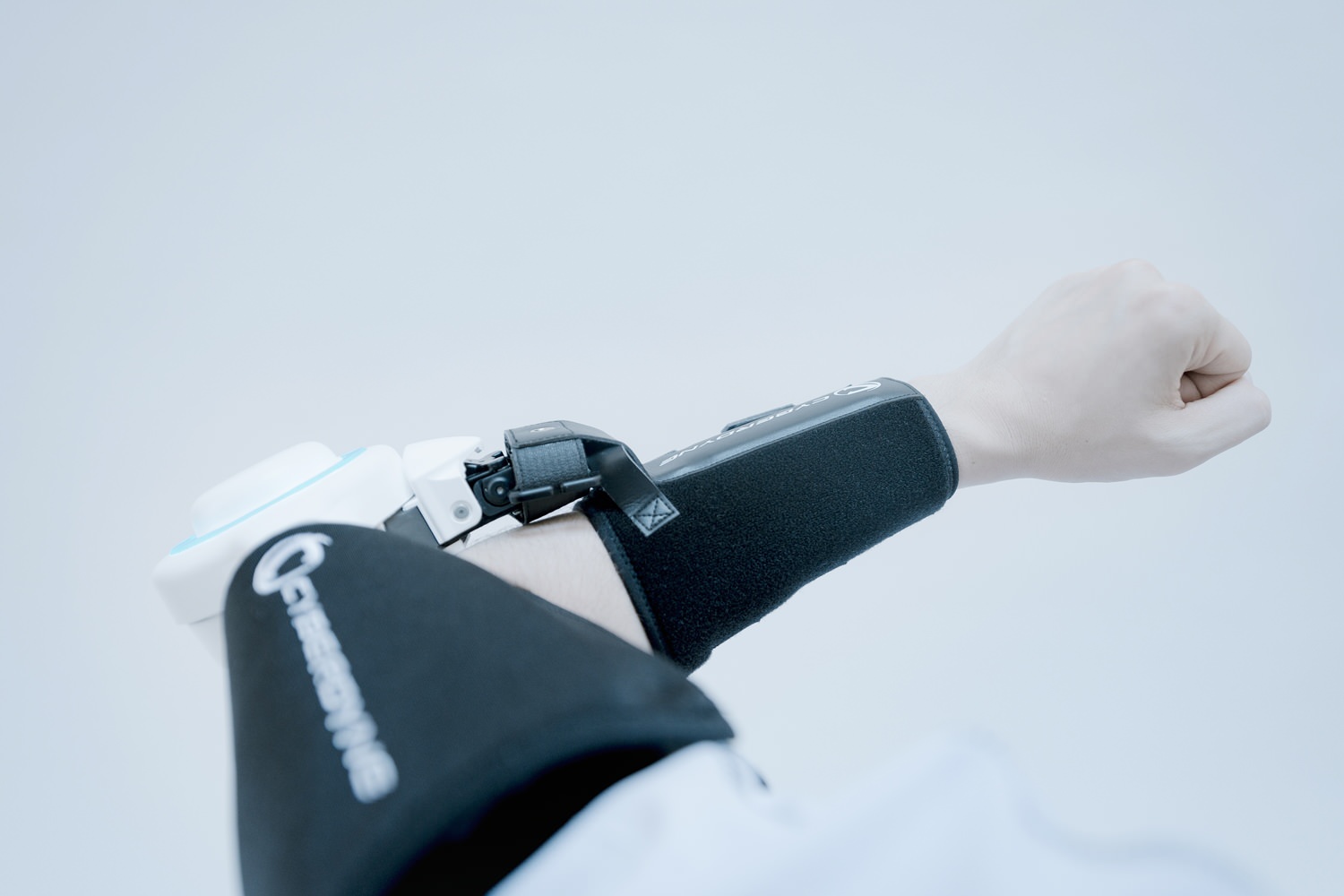
The Hybrid Assistive Limb is a powered exoskeleton suit developed by Japan’s Tsukuba University and the robotics company Cyberdyne. It is designed to support and expand the physical capabilities of its users, particularly people with physical disabilities.
Cyberdyne’s Hybrid Assistive Limb (HAL) exoskeleton, which uses sensors placed on the skin to detect small electrical signals in the patient’s body and respond with movement at the joint, are designed to assist patients rehabilitate from conditions leading to lower limb disorders, including spinal cord injuries and strokes.

HAL [Hybrid Assistive Limb] is the world‘s first * cyborg-type robot, by which a wearer‘s bodily functions can be improved, supported and enhanced.

Wearing of HAL leads to a fusion of “man”, “machine” and “information”. HAL assists a physically challenged person to move and enables him or her to exert bigger motor energy than usual. HAL is also considered as the system that accelerates a motor learning of cerebral nerves.

01.THINK
First of all, think “I want to walk!”
When a person moves the body, he or she first thinks about the motions in his or her brain.
By thinking “I want to walk.” the brain transmits necessary signals to muscles necessary for the motions through nerves.
Receiving the signals, muscles move.
In the healthy body, each muscle is able to receive signals destined from the brain to it and move as strongly and fast as intended.
HAL reads signals.
Signals sent to muscles by the brain leak on the skin surface as very faint signals, so called “bio-electric signals [BES]”. HAL is able to read BES by only attaching the originally developed detectors on the surface on the wearer‘s skin. By consolidating various information, HAL recognizes what sorts of motions the wearer intends.

HAL moves as the wearer intends.
HAL, in accordance with the recognized motions, controls its power units.*2 This function enables HAL to assist the wearer‘s motions as he or she intends and exerts bigger power than he or she ordinarily exerts.
*2 HAL preforms assistance for the wearer‘s motions by a combination of Cybernic Voluntary Control [CVC] system, with which Robot Suit moves as the wearer intends by detecting BES, and Cybernic Autonomous Control [CAC] system, with which Robot Suit replicates human motions based on fundamental motion patterns in the absence of BES.This is the advanced technology on which HAL is founded.
05.FEEDBACK
The brain learns motions.
The mechanism to move the human body does not end up with only moving muscles. The brain confirms how the body moved on what sort of signals. When HAL has appropriately assisted the motions of “walking”, the feeling “I could walk!” is fed back to the brain. By this means, the brain becomes able to learn the way to emit necessary signals for “walking” gradually. This leads to “the important first step” in walking of the physically challenged person without being assisted by HAL. The only robot that can provide appropriate solutions for motions to the brain is HAL.