
Unlike conventional self-driving systems, Wayve aims to create a scalable, mapless, and vehicle-agnostic autonomy platform powered by AI foundation models.
Wayve’s approach is based on Embodied AI, where intelligence emerges from interaction with the real world rather than predefined rules.
Key Idea
- AI learns driving like a human:
- Observing
- Interacting
- Adapting
This contrasts with traditional systems that rely on:
- Predefined rules
- HD maps
- Modular pipelines
Capabilities
- Learns from real-world driving data
- Generalizes to new environments
- Handles unpredictable scenarios (“long tail problem”)
Wayve specializes in developing AI foundation models for autonomous driving. Our technology equips vehicles with a ‘robot brain’ that can learn from and interact with real-world environments.
Optimized for safe driving
Embodied AI uses a domain-optimized model architecture that prioritizes automotive safety, resulting in safe and natural driving performance.
Solves the long-tail problem
Embodied AI has superior generalization capabilities, allowing it to applying ‘learned’ driving skills to unexpected scenarios, even without prior training exposure.
Efficient and large-scale learning
Our self-supervised learning method enables efficient, large-scale learning, essential for seamlessly adapting AI capabilities to new vehicles and geographies.
3. AV2.0 Architecture (End-to-End Driving Model)
Wayve defines its architecture as AV2.0, a next-generation autonomous driving stack.
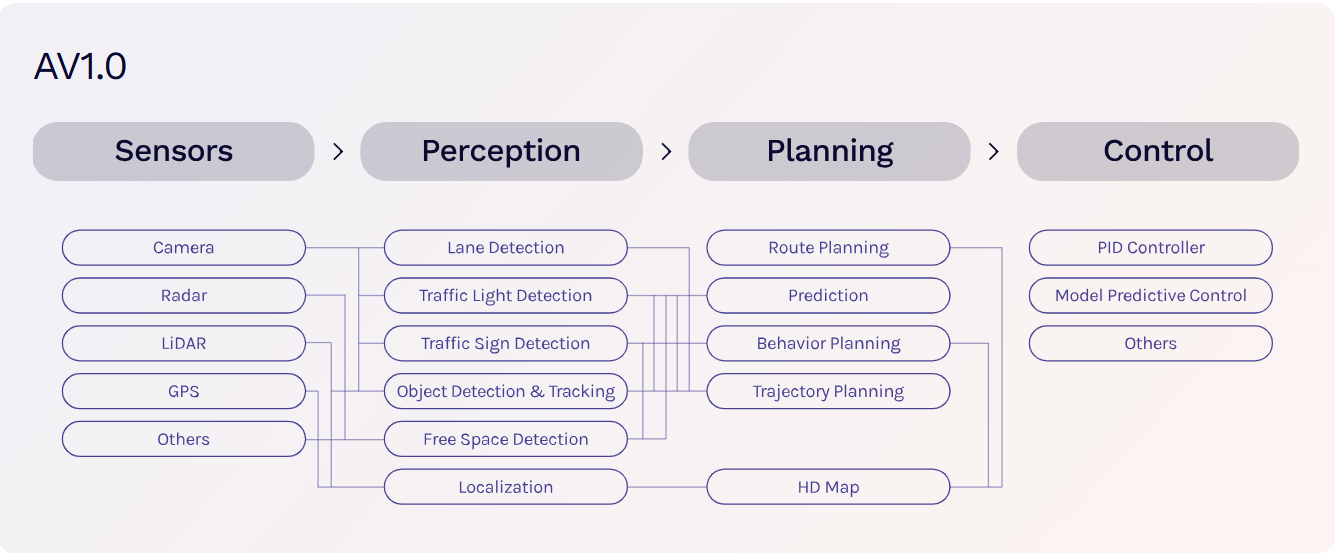
3.1 Traditional AV1.0 (Legacy Approach)
Sensors → Perception → Localization → Planning → Control
- Modular pipeline
- Heavy reliance on:
- LiDAR
- HD maps
- Rule-based logic
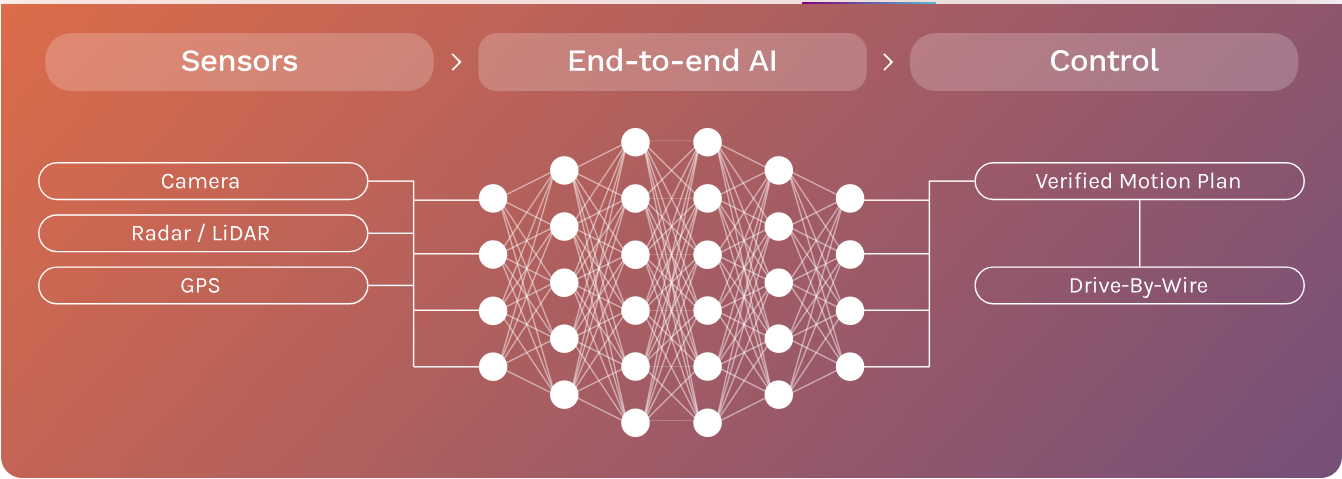
3.2 Wayve AV2.0 (End-to-End AI)
Sensors (camera/radar) → Neural Network → Driving Actions
- Single deep neural network
- Direct mapping:
- Raw sensor input → steering, braking, acceleration
👉 Eliminates intermediate modules
3.3 Key Architectural Innovations
a. End-to-End Learning
- Entire driving task learned jointly
- Reduces system complexity
- Improves adaptability
b. Self-Supervised Learning
- Trains on unlabeled data
- Eliminates costly manual annotation
c. World Models
- AI builds an internal representation of environment
- Predicts:
- Vehicle motion
- Other agents’ behavior
d. Vision-Language-Action Models (e.g., LINGO)
- Combines:
- Visual perception
- Language understanding
- Action planning
4. Mapless Autonomy
Traditional Systems
- Depend on:
- HD maps
- Pre-scanned environments
Wayve Approach
- No HD maps required
- Uses real-time perception + learned behavior
👉 Benefits:
- Faster geographic expansion
- Lower operational cost
- Works in unseen cities
Key Differentiators vs Competitors
| Feature | Wayve | Waymo | Tesla |
|---|---|---|---|
| Architecture | End-to-end AI | Modular + AI | End-to-end hybrid |
| HD Maps | ❌ No | ✅ Yes | ❌ No |
| Sensor Dependence | Flexible | Heavy (LiDAR) | Vision-first |
| Learning Approach | Self-supervised | Supervised + rules | Fleet learning |
| Generalization | High | Moderate | High |