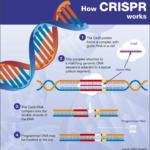
CRISPR (Clustered Regularly Interspaced Short Palindromic Repeats) technology has revolutionized genetic editing across various organisms, including plants. Here's how CRISPR is utilized in plant genetic editing:
Targeted Gene Editing: CRISPR enables precise modifications in the plant genome by targeting specific DNA sequences. Researchers design guide RNA molecules complementary to the target DNA sequence, which then guides the CRISPR-associated protein (Cas) to the desired location in the...
More